RadioRoSo
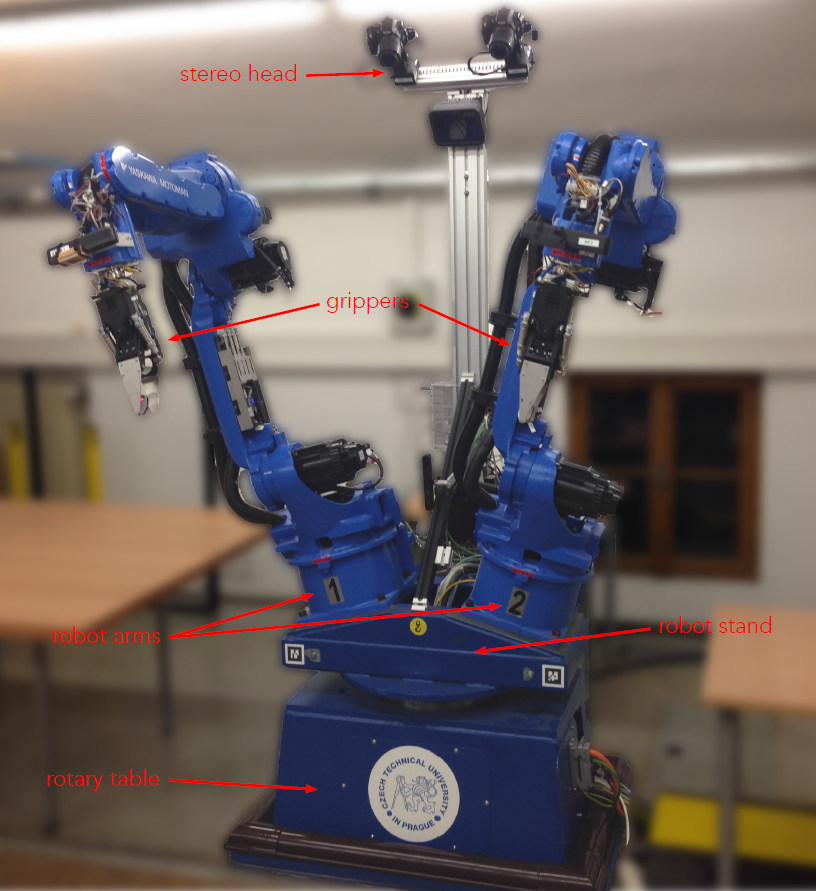
RadioRoSo The 13-axes dual-arm robot (being improved and converting to RadioRoSo testbed gradually) was inherited from CloPeMa project. It is based on two industrial welding hollow-wrist manipulator arms Yaskawa/Motoman MA 1400, each having 6 DOFs. These two arms are connected to the robot stand and placed on the rotary table providing 13th axis. The test bed is depicted in the image below.
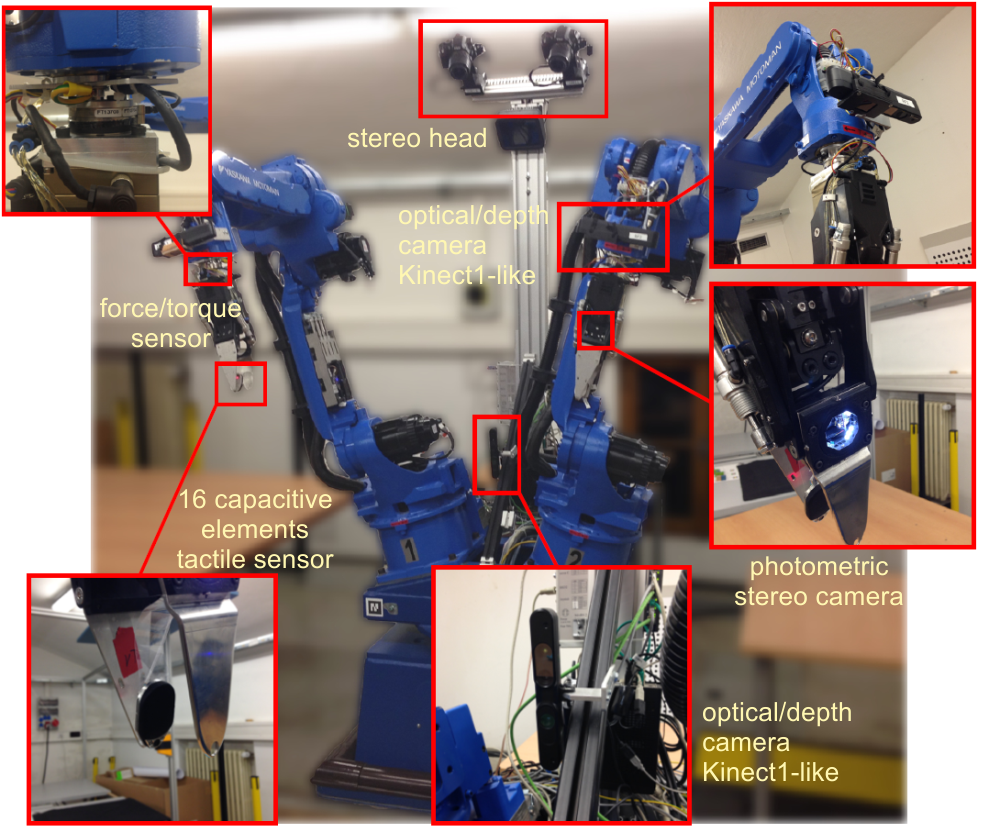
The test bed inherited a rich sensory subsystem from the project CloPeMa. This stage is illustrated in the photograph below. This test bed is being converted RadioRoSo test bed gradually to cope with sorting radioactive waste scenario(s). The main change is going to be in a new gripper, which is under development with the University of Genova RadioRoSo partners.